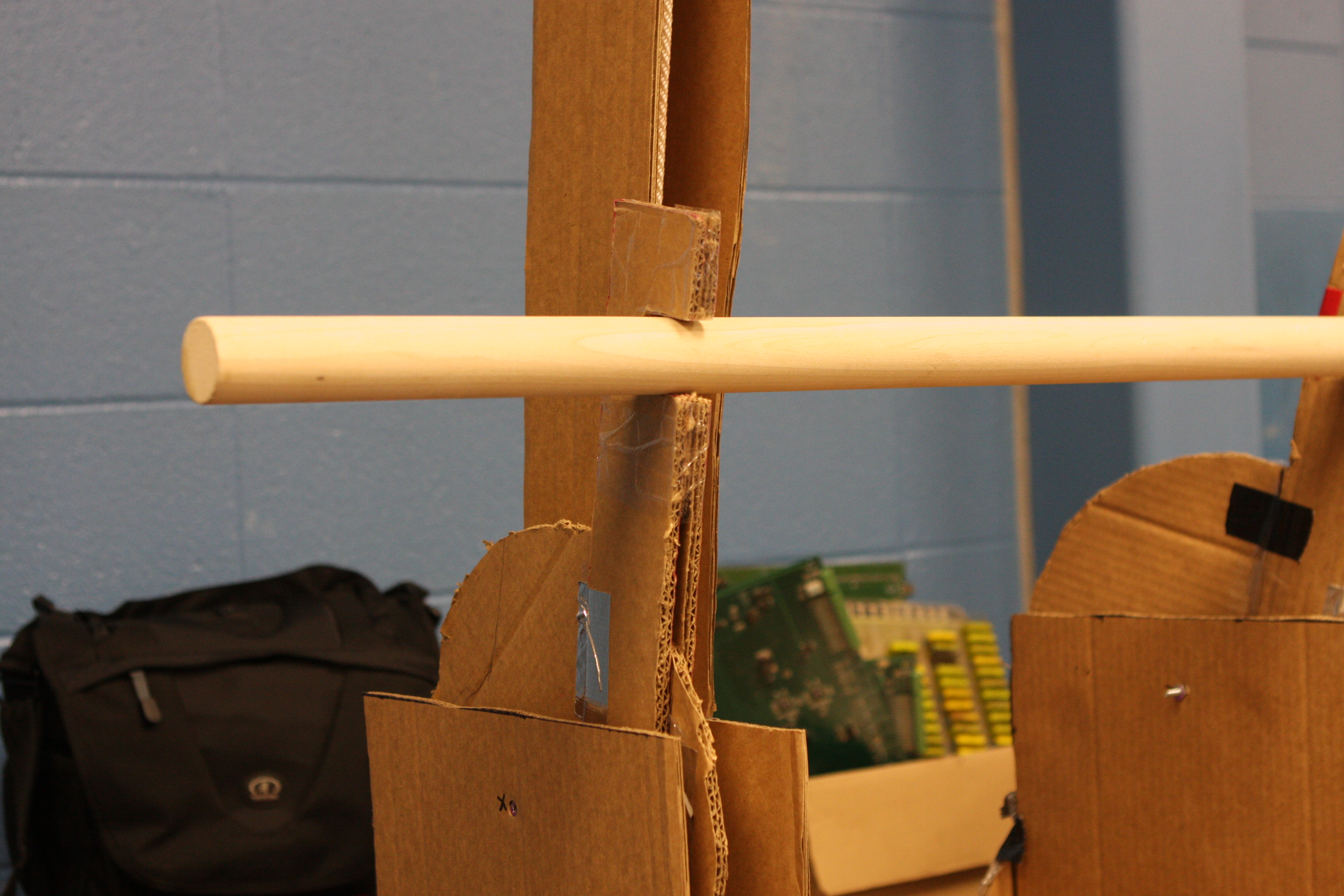
Step # 1 - The process begins with the Jump Arm in the vertical position. In this orientation the finger gripper will align with the bottom level pipe. Driving the robot to the pipe engages the gripper to the pipe.
 |
|
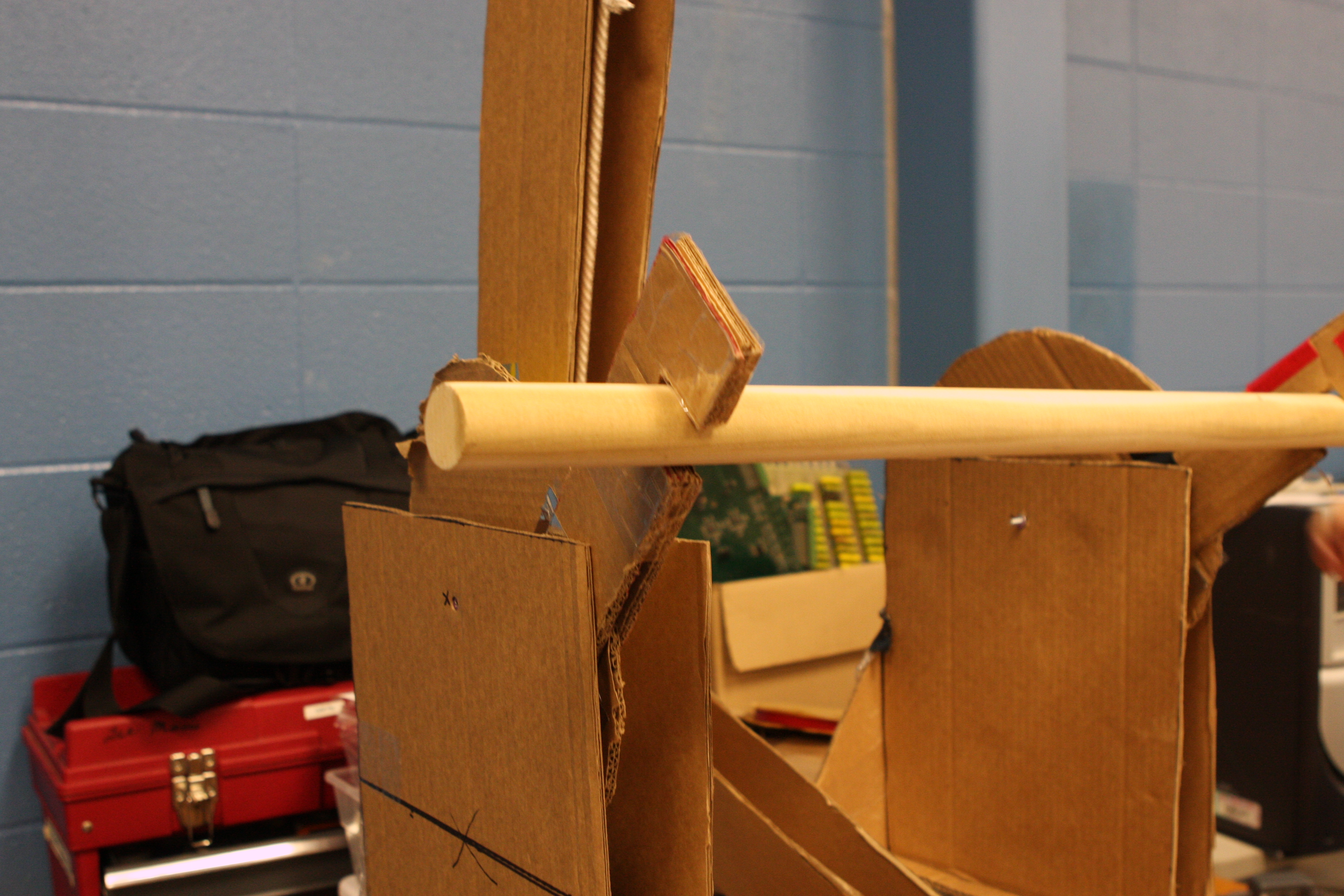
Step # 2 - The Jump Arm rotates raising the robot.
 |
|
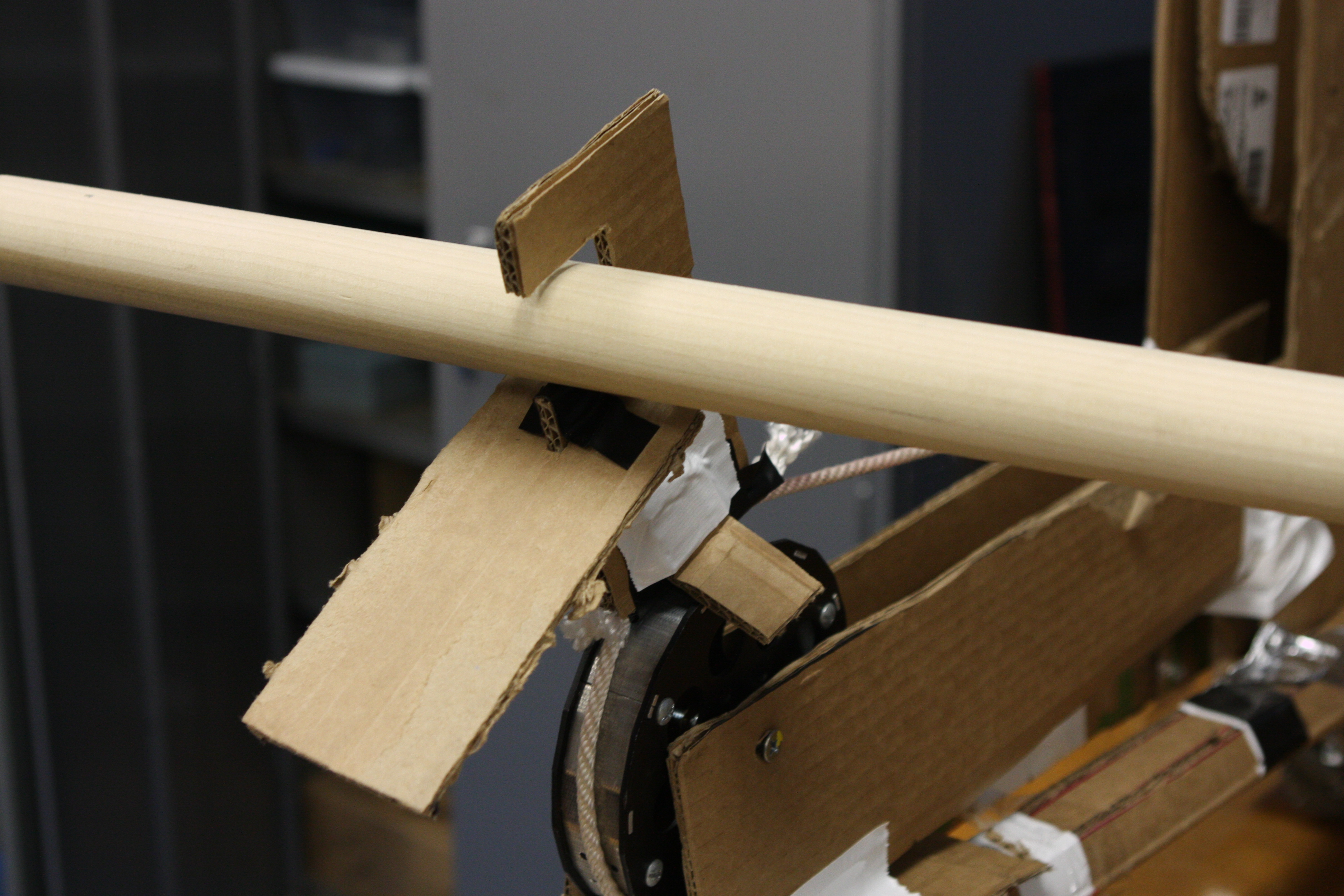
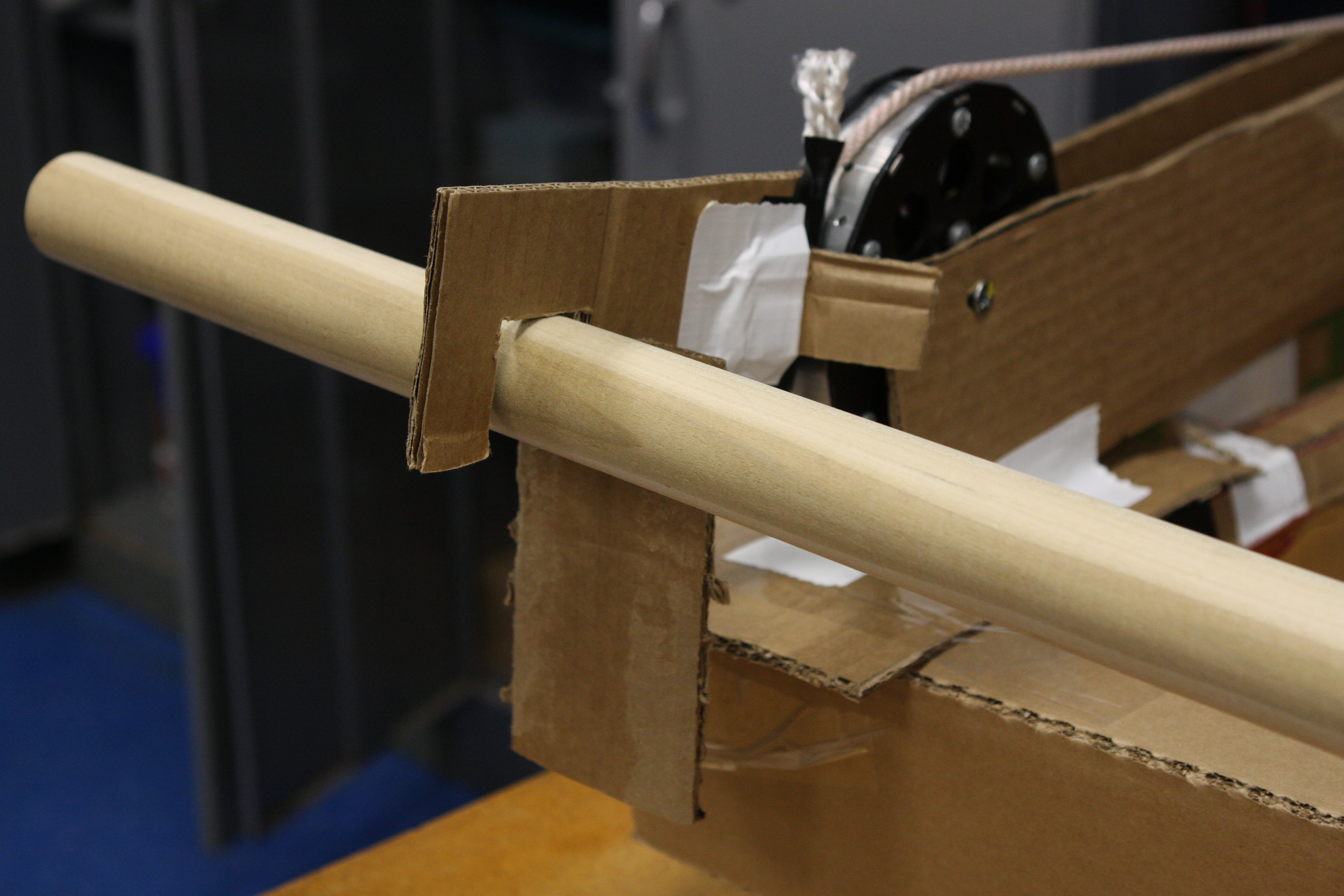
Step # 3 - When the Jump Arm has completed about 90 degrees of rotation, the robot is fully suspended and not touching the floor.
 |
|